Overview & Specifications
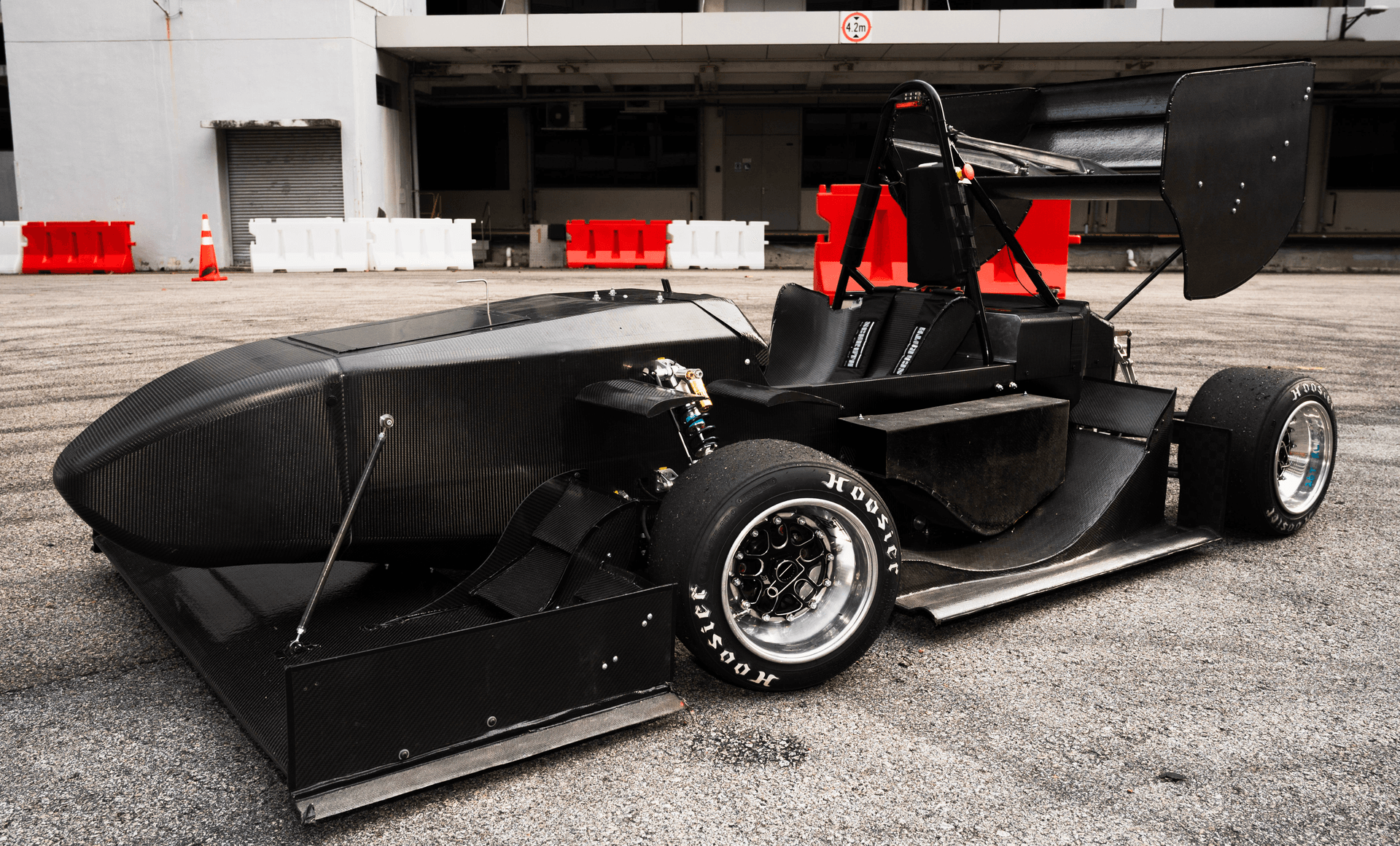
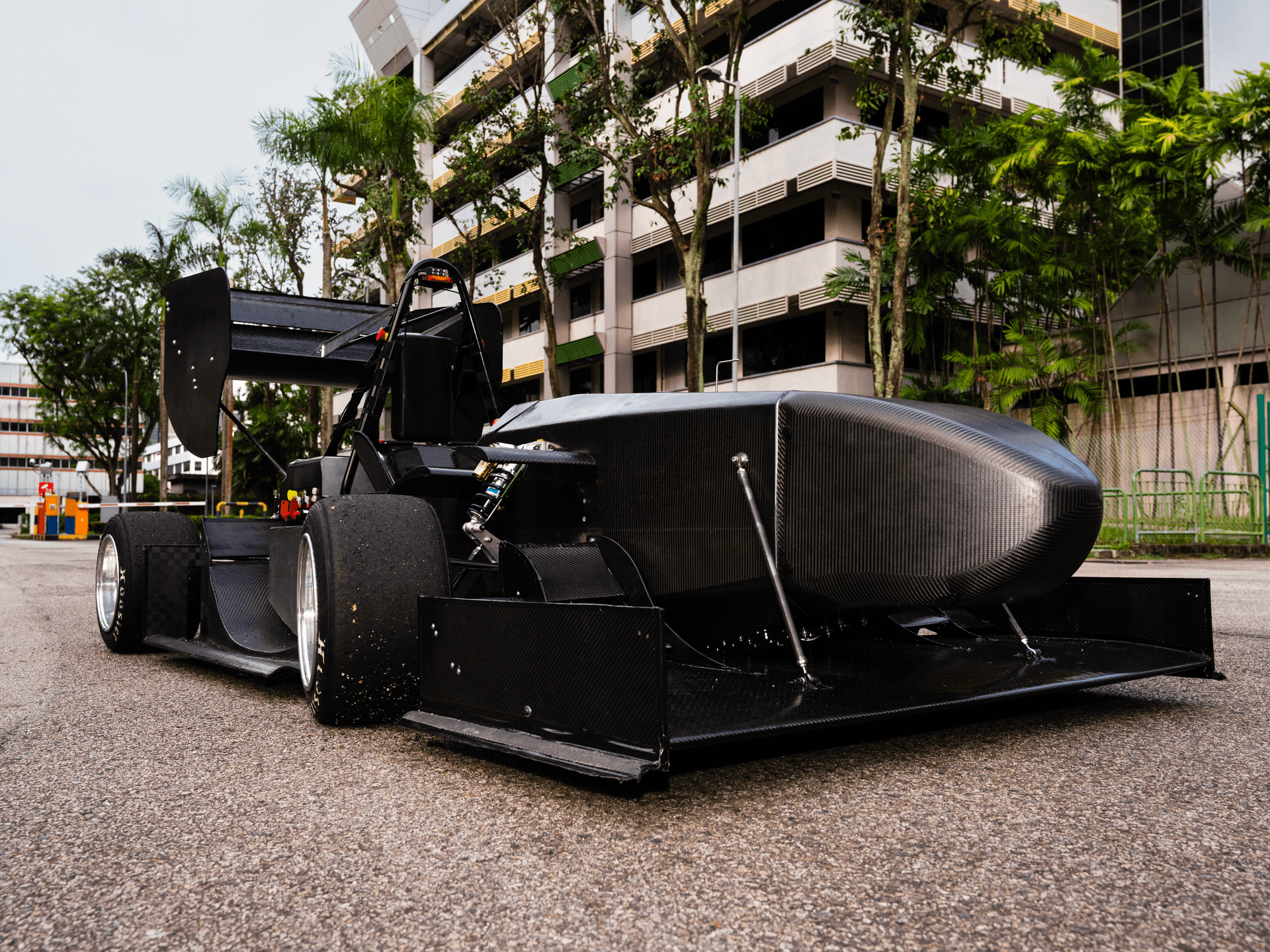
The NUS Formula SAE R26e is a high-performance, fully electric formula-style race car built to compete internationally under the FSAE Michigan 2026 rules. Weighing in at just 198 kg, the car features a lightweight Carbon Fiber Monocoque chassis and an advanced aerodynamics package capable of producing over 1,330 N of downforce at 80 km/h.
It is powered by a custom 6.88 kWh battery pack delivering up to 137 kW of peak power to an Emrax 228 Liquid-Cooled motor, via a Borgwarner Cascadia Motion CM200DX motor controller. This rear-wheel-drive setup outputs a staggering 220 Nm of peak torque, propelling the car with extreme acceleration and precision handling.
LV Electrical Architecture & PCB Design
As the Low Voltage Engineer, I architected the vehicle's full LV electrical system—including STM32-based embedded controllers, power/IO interfaces, and 12 V DC-DC converters—while owning the LV power budget across all subsystems. I designed and fabricated 4 custom PCBs, validating and deploying 2 mission-critical boards onto the car, and selected, integrated, and calibrated the entire sensor and actuator network.
Core Architecture & Dashboard
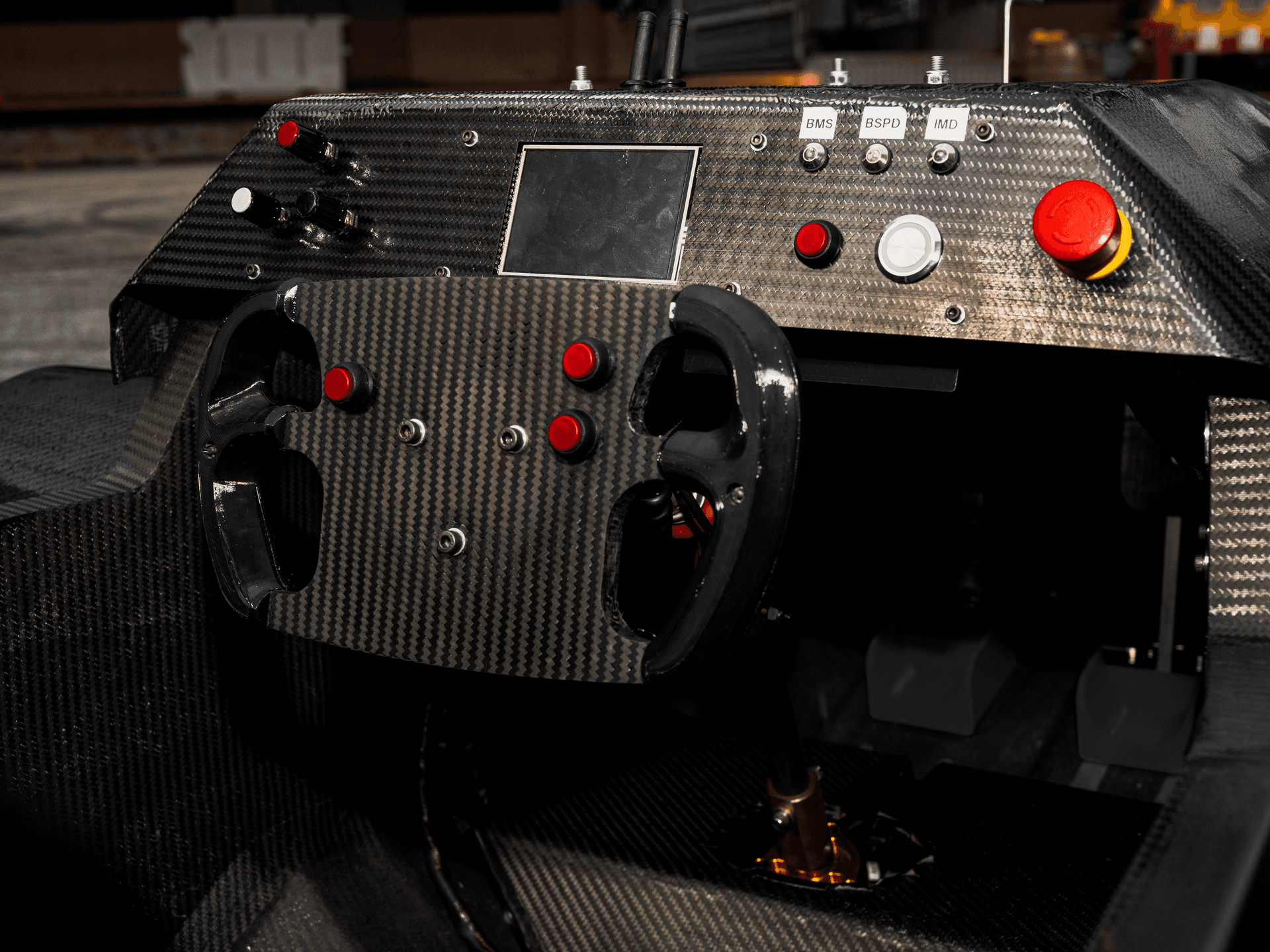
Engineered a custom driver dashboard powered by an STM32F4 microcontroller, utilizing real-time operating systems (FreeRTOS) for split-second, reliable performance. I designed the user interface to include steering wheel buttons and selector knobs, allowing drivers to make instant adjustments to current limits and regenerative braking mid-lap. The system runs a highly optimized CAN communication network to ensure smooth, immediate display updates.
Real-Time Telemetry & Cloud Integration
Built a live telemetry pipeline streaming 15 CAN IDs to an AWS server over a SIM7600G LTE modem, delivering 10 updates per second at under 100 ms end-to-end latency. This data feeds a custom Next.js telemetry web app with live data plotting, thermal tracking, and ML-based energy estimation, giving race engineers actionable thermal-limit and endurance-pacing guidance in real time.
Data Acquisition & Vehicle Network
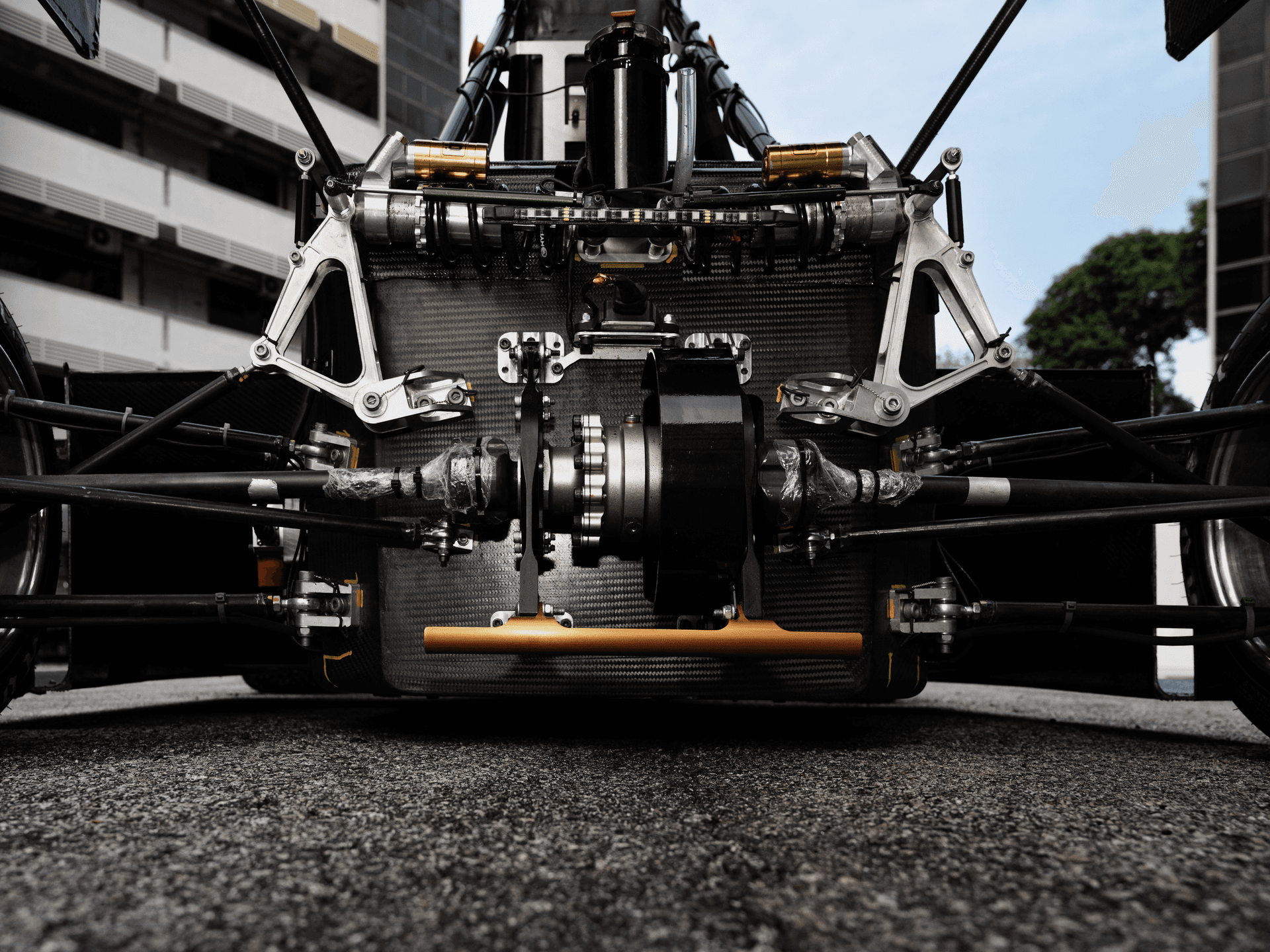
Designed and managed the car's central nervous system—a 1 Mbps Controller Area Network (CAN bus) connecting 39 sensors across the aerodynamics, suspension, and braking systems. I meticulously optimized network traffic to eliminate dropped messages and command latency, ensuring the electric motor always received commands instantly. I also implemented 100 Hz data logging, giving the team objective, high-resolution telemetry to coach drivers on optimal braking points and racing lines.
Electrical Harnessing & Integration
Designed and built most of the car's low voltage (LV) electrical architecture. This included manufacturing fully waterproofed, automotive-grade wiring harnesses validated against the extreme vibration, heat, and weather exposure of competitive racing. I also packaged and integrated the BSPD, sensor network, and custom dashboard alongside the mechanical, software, and vehicle dynamics teams.
ECU Firmware & Performance Control
Developed custom firmware for the MoTeC M150 electronic control unit (ECU) to manage advanced vehicle dynamics, including launch control and real-time CAN broadcasting. A major highlight was designing an Active Brake Regeneration System—a system that automatically blocks rear brake fluid pressure when the pedal is pressed, seamlessly replacing mechanical braking with electrical energy recovery. This system successfully recovered around 46% of kinetic energy, pulling peak charging currents of -98.5 Amps back into the battery pack!